在海洋经济崛起与全球深海探索需求升级的双重驱动下,水下机器人已成为海洋资源开发、科学研究与应急救援的核心装备,2025年行业整体呈现技术突破加速、市场规模扩容、应用场景多元的发展态势。据中国报告大厅数据,2024年我国水下机器人产量达5582台/套,市场规模12.49亿元,2025年产能预计同比增长12%,产量将突破6903台/套,全球市场规模同步攀升至180亿美元(QY Research数据)。从区域格局看,北美凭借技术先发优势主导高端市场,欧洲在环保型机器人领域领跑,而中国作为亚太地区核心增长极,已形成广东(7.47万家企业)、江苏(6.10万家)、浙江(4.09万家)为核心的产业集群,在深渊探测、多机器人协同等领域实现从跟跑到并跑的跨越,部分技术性能与国际顶尖产品差距缩小至15%以内。
水下机器人作为成本低廉、功能多样且便携的先进装备,广泛应用于海洋工程、生态保护、资源勘探等领域——在海洋石油天然气探测中,可实现水下管道腐蚀检测与井口维护;在海洋底栖生境保护中,能精准采集生物样本并监测生态变化;在海上地震采集作业中,可替代人工完成高危环境下的数据采集。作为国家战略新兴产业范畴的高端制造装备,其虽短期体量有限,但战略价值显著,是衡量一国海洋科技实力的重要标志。不过,行业发展仍面临挑战:为满足搜救、检查、打捞等单一场景需求,部分产品功能性趋于固化,难以应对复杂多变的水下环境;同时,小型水下机器人为提升作业能力,体积与重量不可避免增加,一定程度上限制了机动性,这些痛点成为技术迭代的核心方向。
从全球技术演进来看,二十世纪以来,美国、日本等海洋大国率先突破混合式水下机器人技术,成果获国际认可。美国伍兹霍尔海洋研究所(WHOI)研制的海神号(Nereus HROV),自带能源且支持模式灵活切换——以遥控模式(ROV模式)完成取样与轻作业,配备独立作业单元,可现场短时间改装为自主模式(AUV模式),适配不同任务需求;日本东京大学开发的R2D4智能水下机器人,专为深海与热带海区矿藏探测设计,借助水底声波反射分析地形,可拍摄高精度图像,其总长4.4米、高1.08米、质量约1058公斤,最大下潜深度达4000米;美国Forum Energy Technologies的轻型工作级ROVComanche38,2021年完成极地海上试验后,被用于北极和亚北极海底生态系统勘探,安装于加拿大研究破冰船CCGSA mundsen上,展现出极强的极端环境适应性。
我国水下机器人研究虽起步较晚,但近年来在政策支持与科研攻关下成果显著,部分技术达到国际先进水平。上海交通大学研发的海龙2号无人遥控潜水器,可在3500米水深、高温高压环境下开展海洋调查,配备5台多功能摄像机、1台静物照相机及多组照明灯,搭载2个多功能机械手(最大抓取重量250公斤),能为科考提供高清影像与实物样本;中国科学院沈阳自动化研究所主持研发的海星6000ROV,在战略性先导科技专项支持下,可完成深海生物、沉积物、水样等系列化取样,以及激光拉曼原位测量,填补了我国6000米级深海作业装备的空白;国内多单位联合研制的海马号ROV,采用6061-T6槽铝焊接框架(兼具耐腐蚀性、低密度与高强度),配备9台摄像机(含1台高清设备)、9只水下灯及2套机械手(左前五功能、右前七功能),可协同完成海底取样、线缆切割等作业,已在南海多次执行探察任务,不过其方正外形导致水下运动阻力较大,作业时需依赖母船提供运输与技术支持。
水下机器人系统总体设计
当前市场主流的小型水下机器人,普遍采用陆上控制系统+水下作业系统的架构,两大系统包含多个功能子系统,协同实现水下作业的精准控制与高效执行。
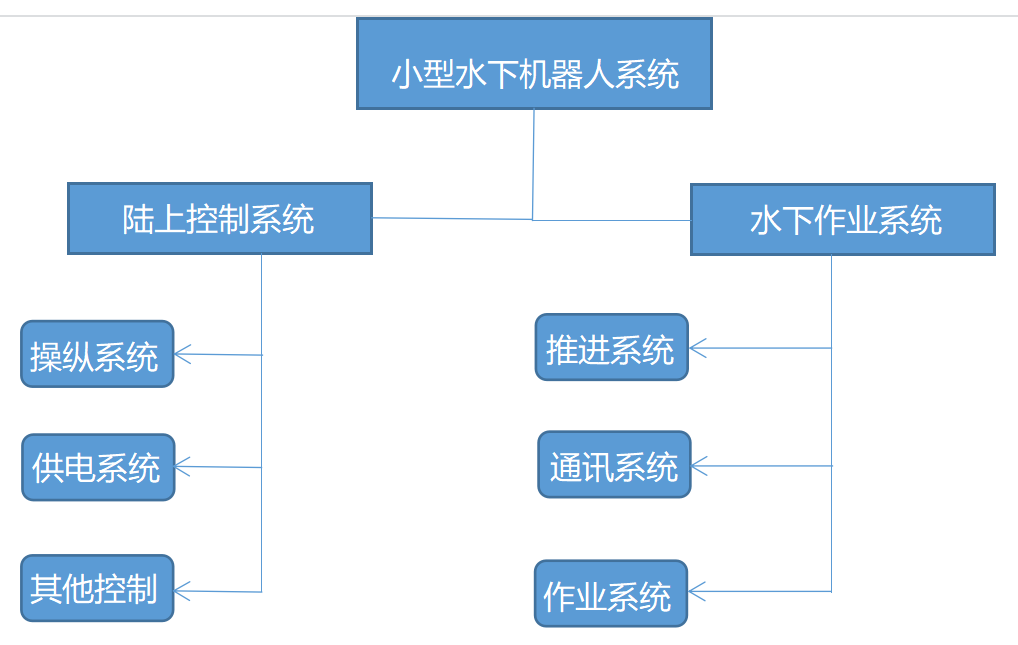
(一)陆上控制系统
陆上控制系统是操作人员与水下机器人交互的核心枢纽,承担指令发送、数据接收与状态监控功能,主要由操纵系统、供电系统及其他控制系统构成。
1.操纵系统:为人员操作提供可视化平台,通常集成于专用控制箱(内置处理器、显示器、输入设备)或笔记本电脑(便于便携与现场调整)。其中,处理器作为核心,负责数据处理与指令转换;显示器实时反馈水下高清视频、深度、速度等关键参数;鼠标、键盘等输入设备支持操作人员下达前进、下潜等指令。系统预装高效稳定的控制算法,通过建立机器人动力学模型、编写预测控制算法,确保指令响应快、信号震荡低,使整机具备较强抗干扰能力,适配复杂水下环境作业。
2.供电系统:针对水下部件均采用DC直流供电的特性,结合舱体空间限制,形成两种供电方案:一是小型ROV直接携带直流蓄电池,非工作时可单独取出充电,不过会增加设备负重,且需严格保障蓄电池水密性;二是通过陆上大功率整流变压器,经脐带缆为水下系统供电,适用于长时间、大功率作业场景,如深海勘探与管道维护。
3.其他控制系统:主要负责状态信息处理、指令传输及连接保障,其中连接系统是关键支撑——通过适配水下作业环境的工业级连接器与专用传输模块,实现陆上设备与脐带缆的稳定对接,其核心作用是保障指令信号与数据传输的连续性和可靠性。连接系统需具备抗振动(10-2000Hz)、耐温防潮(-40℃~85℃)特性,接触电阻≤10mΩ,同时通过防呆插合设计避免安装误操作,插拔寿命≥5000次,确保在复杂作业环境下不出现信号中断或传输延迟,在此基础上将操作人员指令经处理器转换为信号,通过连接系统与脐带缆精准发送至水下单元;同时接收ROV传回的设备状态、环境数据,经处理后直观呈现给操作人员,还可针对不同工作需求灵活展示参数变化,支持操作人员精准调试,确保机器人按预设任务执行。
(二)水下作业系统
水下作业系统是机器人实现功能的核心载体,由推进系统、通讯系统与作业系统组成,各子系统协同保障机器人在水下的机动性、通讯稳定性与作业能力。
1.推进系统:决定机器人的运动灵活性,主流采用多推进器设计(舵翼推进因适配流速较高水域,较少用于低速小型机器人)。在设计阶段,需通过水动力数学模型分析优化,选择适配电机与螺旋桨。小型机器人常用X字型六推进器架构,相较于十字型结构,可实现更多样的运动姿态;电机采用直流无刷电机,保障长使用寿命,且能通过电流方向切换实现正反转。理论上,六推进器设计可使机器人完成进退、潜浮、平移、旋转、横滚五个自由度的运动,显著提升灵敏度与机体灵活度,适配复杂水下环境的姿态调整需求。
2.通讯系统:解决陆上与水下的信息交互难题——由于微波通讯在水下衰减快(有效传输仅数米)、信息量低,无法满足高清视频传输需求,小型ROV普遍采用脐带缆有线传输方案。该方案兼具供电与通讯功能,不仅传输速度快、稳定性高,还能保障实时高清视频与传感器数据的双向交互,是当前小型水下机器人的主流通讯选择,尤其适用于近岸救援、浅海勘探等场景。
3.作业系统:根据任务需求配置功能模块,小型机器人以观察、取样、简单操作为主——观察作业通过高清云台摄像机实现,配合可调节云台与水下探照灯,拓展视野并提升低能见度环境下的成像效果;复杂作业则通过更换作业端实现,如加装小型机械手完成抓取、剪断切割,或搭载取样器采集水样、沉积物样本。系统预留多类型拓展接口,增强功能适配性,合理设计的模块化结构可快速切换作业单元,提升设备利用率。
当前国内水下机器人产业仍面临核心技术受制于人的挑战——关键部件如高端传感器、耐压壳体材料等依赖进口,导致设备性能发挥受限,维修保障成本较高,难以实现大规模量产。但我国拥有辽阔海域与丰富海洋资源,为产业发展提供了天然优势:据《2025-2030年全球及中国水下机器人行业报告》,2024年我国海上平台总数超1.2万个,8万公里海底管道亟需维护,深海矿产资源勘探需求年增速超20%,这些场景为水下机器人提供了广阔市场空间,也推动行业加速突破技术瓶颈。
水下机器人行业 核心技术突破与未来趋势
2025年我国水下机器人行业在核心技术领域实现多项关键突破,为未来发展奠定坚实基础。深度探测方面,海斗一号成功完成多次10000米级深渊科考任务,在南海9740-10767米深度区间持续作业,创造我国无人潜水器连续下潜深度纪录,其采用的新型耐压壳体材料与抗冲击控制算法,使设备可靠性较早期型号提升3倍,多船兼容系统还将单次任务数据采集效率提高40%。智能化方面,新一代机器人搭载AI图像识别系统,在北极冰区科考中定位准确率达98%,模块化设计支持快速更换作业单元,可同步完成地形测绘、生物采样等复合任务,形成自主控制-智能规避-多源融合的技术闭环。

从未来趋势看,行业将朝着三大方向加速演进:
智能化与自主化升级。随着AI、大数据与物联网技术的融合,水下机器人将具备更强自主决策能力——可自主规划路径、识别目标物体并动态调整作业方案,如世航智能自研的全自由度姿态控制算法,使机器人抗流能力显著提升,可在0-10000米水深稳定作业。同时,设备将更注重数据处理效率,2025年相关深海数据交易规模预计达80亿元,区块链技术的引入将实现数据确权,推动科研数据向可交易资产转化。
多机器人协同与新兴技术融合。多机器人协同作业成为提升效率的关键,如青岛国际海洋科技展上,10台AUV集群执行海底测绘任务,耗时仅为单机的1/5,未来该模式将在深海资源勘探、海底基础设施维护中广泛应用。此外,水下机器人正与VR、元宇宙技术结合,某文旅项目通过机器人直播珊瑚礁生长,结合VR打造沉浸式海洋馆,单日客流超万人次,拓展了民用消费场景。
应用场景多元化与国产化替代加速。在传统海洋工程、科研领域外,机器人正进入灾难救援、海洋牧场、极地探测等新兴场景——湖北中安国际的水下机器人,可在能见度不足5米的浑浊水体中,1分钟内生成1:1三维实景地形图,最深下潜300米,今年已完成长江水域丢失设备打捞、贵州溶洞救援等任务,企业订单实现翻倍增长。国产化方面,2025年我国水下机器人出口至9个国家,在海洋资源勘探领域市占率达27%,成本较欧美产品低40%,随着核心部件如高端传感器、自主导航系统的突破,预计2030年全海深探测体系将实现自主可控,国产设备在全球市场的竞争力将进一步提升。
2025年,我国水下机器人行业正处于从技术突破向产业落地的关键转型期,政策支持(如工信部《海洋工程装备制造业中长期发展规划》、科技部专项基金)、市场需求与资本投入形成合力,推动行业快速发展。未来,随着核心技术自主化、应用场景多元化与商业模式创新,水下机器人将成为激活海洋经济的新质生产力,为我国建设海洋强国提供关键装备支撑。